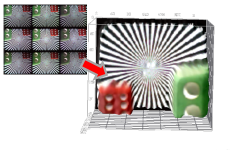
We can acquire objects' depth map by analysis of the disparity included in the image captured by TOMBO.
Depth maps are used for recording of objects' 3D shape, making all-focused image, and making 3D image.
Using depth maps, we can registrate unit images. We can also make high resolution images by reconstruction of registrated unit images.
Although acquiring objects' depth map requires high computational effort, it can be reduced by parallel processing. |